說(shuō)起開(kāi)車(chē)��,每個(gè)車(chē)主應(yīng)該都體驗(yàn)過(guò)倒車(chē)的恐懼�����。汽車(chē)在向前開(kāi)的時(shí)候一般情況下都比較好控制���,這是駕駛時(shí)視野決定的便利����;而在倒車(chē)時(shí)�,從習(xí)慣上來(lái)說(shuō)�,車(chē)主是需要分心觀察車(chē)后的情況,抬頭看內(nèi)視鏡�,歪身看后視鏡,更有甚者回頭看車(chē)后的情況也是大有人在����。這些行為無(wú)疑不是在危險(xiǎn)邊緣試探。
無(wú)處不在的危險(xiǎn)——盲區(qū)

(1).無(wú)論是借助倒車(chē)鏡還是后視鏡���,對(duì)后擋風(fēng)玻璃以下部位的情況完全無(wú)法觀察。根據(jù)不同車(chē)型的尾部大小�����,在這個(gè)地方會(huì)形成一個(gè)2—3平方米大小的視野盲區(qū),物體離車(chē)尾越近��,越不容易發(fā)現(xiàn)。

(2).C柱即后側(cè)車(chē)柱��,是離司機(jī)最遠(yuǎn)的地方�����,也是倒車(chē)時(shí)最難觀察到的地方��。一般來(lái)說(shuō)����,外形越是流線型的車(chē)身��,C柱盲區(qū)越大�����。位于C柱之后的一大片區(qū)域���,在駕駛位根本無(wú)法觀察�����,一旦有行人突然在該區(qū)域出現(xiàn)�����,司機(jī)很難及時(shí)作出反應(yīng)����。
如今����,隨著各種輔助倒車(chē)產(chǎn)品的出現(xiàn),這在倒車(chē)時(shí)存在的本可以避免的安全隱患����,我們應(yīng)該更加重視起來(lái),并將這種隱患在能力范圍內(nèi)降至最低��,這不僅是對(duì)自己的保護(hù)也是對(duì)他人的一種負(fù)責(zé)��。
在行車(chē)安全方面���,飛歌繼2018年上市的多款行車(chē)記錄儀以及今年年初的360°全景后�����,在倒車(chē)后視市場(chǎng)再添“虎員”——VR倒車(chē)輔助系統(tǒng)�,從性價(jià)比�、實(shí)用性方面給車(chē)主帶來(lái)更多驚喜�����。
解決盲區(qū)隱患——
VR倒車(chē)輔助系統(tǒng)實(shí)現(xiàn)快速倒車(chē)�,車(chē)輛全景模擬360°顯示 車(chē)底透視�,精確識(shí)別車(chē)身位置,準(zhǔn)確還原車(chē)輛周邊場(chǎng)景���,輔助解決倒車(chē)盲區(qū)問(wèn)題。全景模擬與倒車(chē)畫(huà)面同步顯示���,很大程度上避免倒車(chē)盲區(qū)�、刮蹭等安全隱患。

- 最容易忽視的車(chē)底盲區(qū)���?
- 全景車(chē)底透視
車(chē)底盲區(qū)是市場(chǎng)上很少談到的一塊盲區(qū)���,但它確實(shí)是大眾最容易忽視的巨大隱患����。車(chē)底的盲區(qū)是車(chē)內(nèi)視線根本無(wú)法看到的區(qū)域,同時(shí)各種各樣的雷達(dá)都無(wú)法探測(cè)到�����,這往往會(huì)造成較大的安全隱患�。
VR倒車(chē)輔助系統(tǒng)模擬合成行進(jìn)路途中車(chē)底畫(huà)面,鳥(niǎo)瞰圖車(chē)輛底部透明����,車(chē)底情況一覽無(wú)余�。通過(guò)不熟悉的路段時(shí)、路上有大坑或大石頭時(shí)�,都可窺見(jiàn),隱患因子一目了然�,大大提高了倒車(chē)的安全性!
- 夜晚模糊裝上雞肋��?
- 無(wú)光夜視
夜視難題一直以來(lái)不止是車(chē)主頭疼的問(wèn)題�,同時(shí)也是品牌商努力的目標(biāo)。VR倒車(chē)輔助系統(tǒng)配置高清無(wú)光夜視攝像頭��,清晰靈動(dòng)����,色彩逼真,噪點(diǎn)少��,夜間拍攝效果彷如白晝����;全玻鏡頭��,提高透光率�����,高感光智能采光技術(shù)夜間拍攝效果更清晰���!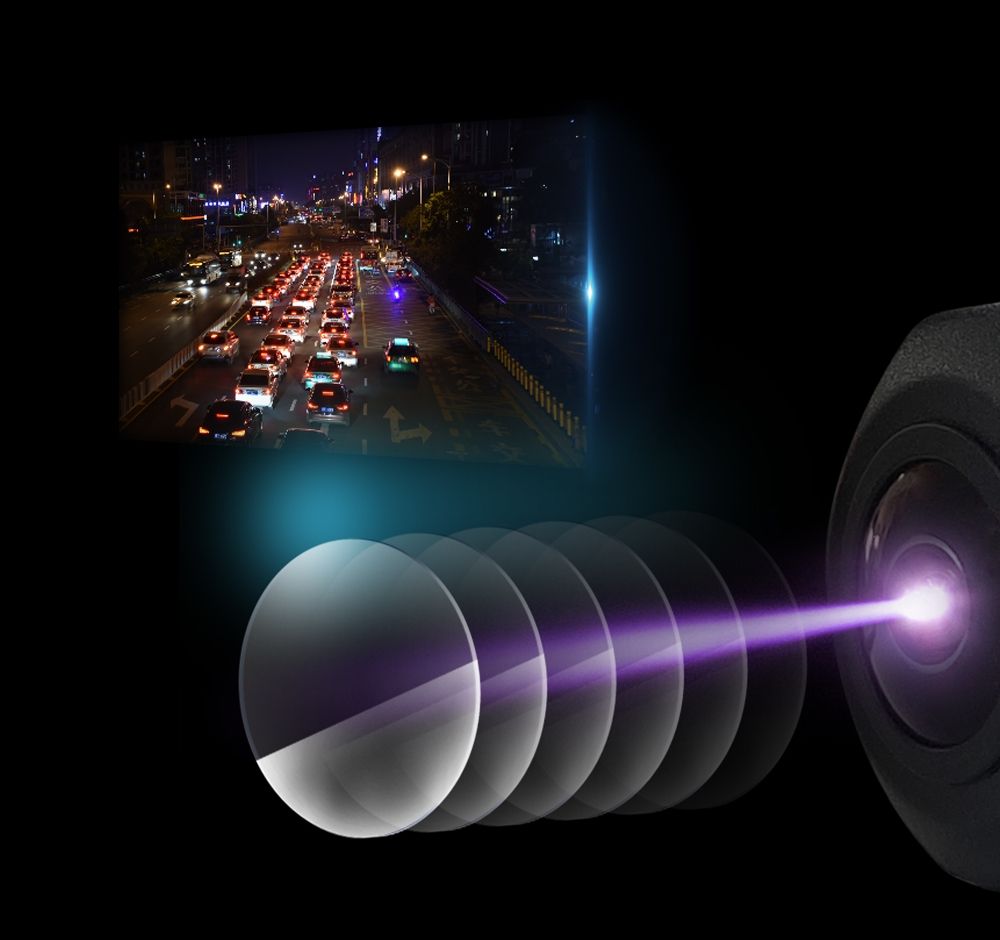
- 只能后視和普通倒車(chē)有兩樣?
- 360°VR高清全景
車(chē)周A柱/B柱/C柱盲區(qū)想必不必多說(shuō)了��,VR倒車(chē)輔助系統(tǒng)360°模擬還原途徑道路實(shí)況��,采用泊車(chē)視頻記憶拼接法��,將通過(guò)的路途�����,經(jīng)過(guò)后臺(tái)科學(xué)算法集成全景畫(huà)面�����,鳥(niǎo)瞰全景輔助車(chē)主判斷道路情況和泊車(chē)條件�。
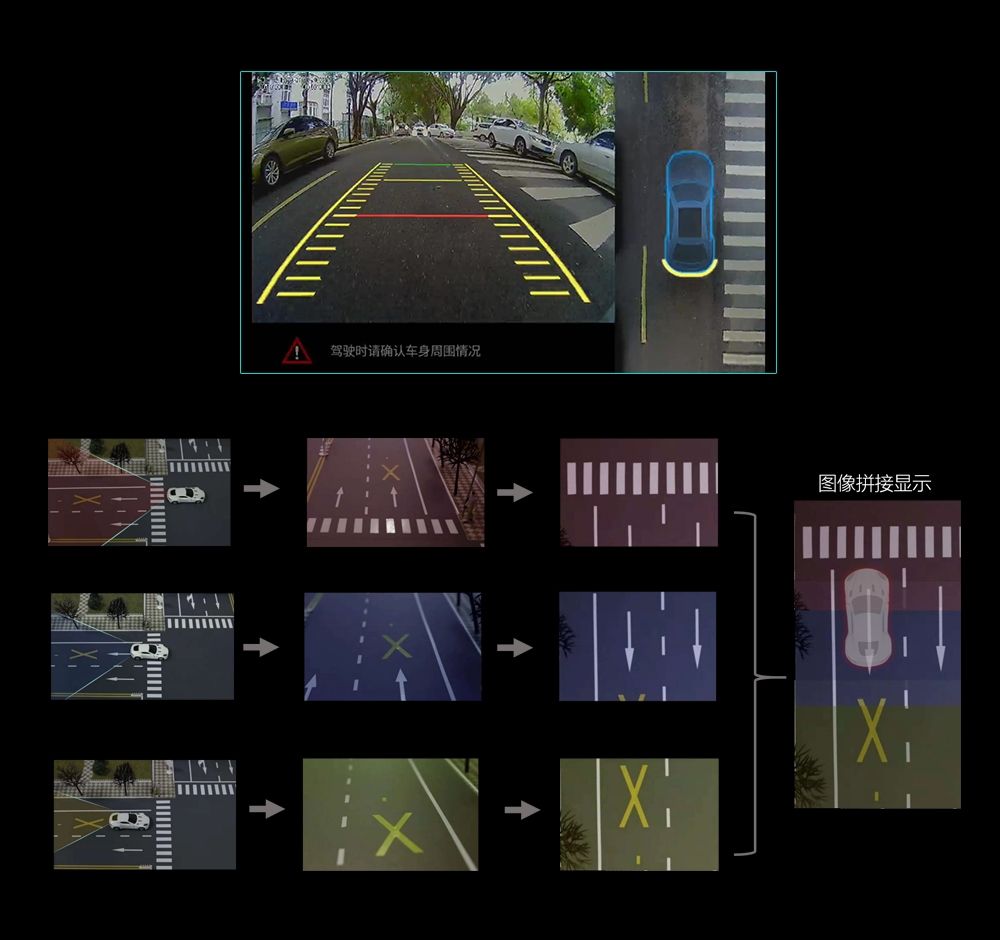
畫(huà)面攝制配備全玻鏡頭���,720P高清后視分辨率�����。360°高清模擬全景 俯視車(chē)底透視����,細(xì)枝末節(jié),分毫可見(jiàn)���,護(hù)航行車(chē)安全�!

- 無(wú)法估算旁邊障礙物距離����?
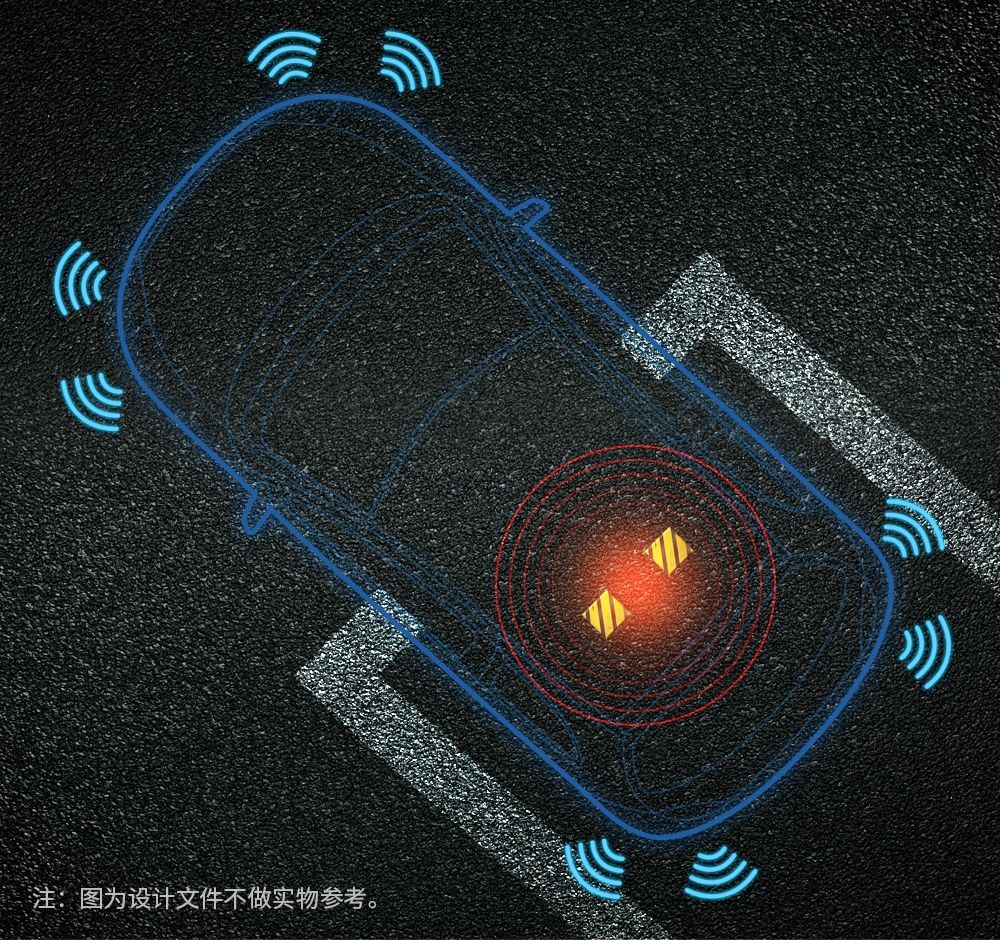
- 虛擬雷達(dá)監(jiān)測(cè)功能
倒車(chē)時(shí)總是無(wú)法預(yù)估車(chē)身與障礙物的距離�����,通?��!邦櫞耸П恕?����,“擺頭”和“動(dòng)尾”難以控制����,要是遇到狹窄路段的停車(chē)位更是耗時(shí)耗神。Flyaudio-VR倒車(chē)輔助系統(tǒng)配置虛擬8個(gè)雷達(dá)��,主動(dòng)檢測(cè)障礙物,智能提醒周?chē)氛锨闆r���,給你帶來(lái)輕松倒車(chē)環(huán)境����。

- 來(lái)來(lái)回回倒不進(jìn)的車(chē)位���?
- 動(dòng)態(tài)倒車(chē)軌跡
倒車(chē)軌跡線通過(guò)圖像標(biāo)定,利用標(biāo)定結(jié)果畫(huà)出的具有引導(dǎo)效果的虛擬線條���,幫助駕駛員規(guī)劃倒車(chē)線路�����。輔助車(chē)主預(yù)估入庫(kù)路徑�,節(jié)省倒車(chē)時(shí)間�����。
Flyaudio-VR倒車(chē)輔助系統(tǒng)經(jīng)過(guò)科學(xué)的數(shù)據(jù)計(jì)算����,準(zhǔn)確捕捉車(chē)身運(yùn)動(dòng)路線����,精準(zhǔn)動(dòng)態(tài)軌跡輔助倒車(chē)�����,解決車(chē)主入庫(kù)難題���。同時(shí),強(qiáng)勁的內(nèi)存掃描�,實(shí)時(shí)傳輸,倒車(chē)畫(huà)面處理流暢不卡頓���,一秒現(xiàn)場(chǎng)反應(yīng)��。

- 視覺(jué)受限看不見(jiàn)的角落?
- 魚(yú)眼鏡頭大廣角視野
在打方向盤(pán)轉(zhuǎn)向時(shí)�,稍不注意就會(huì)忽視了左右兩邊有無(wú)障礙物,當(dāng)然有時(shí)也是受限于視覺(jué)范圍��。飛歌公司本次倒車(chē)輔助利器采用魚(yú)眼鏡頭���,實(shí)現(xiàn)大范圍無(wú)死角攝制��,AHD高清廣角,后視顯像廣而清晰�,畫(huà)面生動(dòng)不變形,輔助解決后視盲區(qū)帶來(lái)的安全隱患����,模擬全景帶來(lái)更大的視覺(jué)范圍,俯瞰全車(chē)周?chē)闆r�����,危險(xiǎn)因素?zé)o處遁形��!

更細(xì)致的倒車(chē)輔助��,更安全的雷達(dá)檢測(cè)�,更寬的視覺(jué)范圍等�����,飛歌公司只做車(chē)主需要的產(chǎn)品��,F(xiàn)lyaudio-VR倒車(chē)輔助系統(tǒng)讓更多車(chē)主能夠體驗(yàn)科技產(chǎn)品給倒車(chē)入庫(kù)帶來(lái)的便利�����!
 X3 Pro智能車(chē)機(jī)
X3 Pro智能車(chē)機(jī) FA系列
FA系列 X2-Pro
X2-Pro GS2_Pro
GS2_Pro ES2
ES2 X2
X2 大眾MQB原廠款
大眾MQB原廠款 ACE
ACE GX酷享版
GX酷享版 GS2
GS2 ES1
ES1 GE
GE X1
X1 GXIV
GXIV GT2
GT2 V2
V2 GT1
GT1 SV1
SV1 V1
V1 流媒體記錄儀H1
流媒體記錄儀H1 流媒體記錄儀H1 Pro
流媒體記錄儀H1 Pro Flyaudio AR實(shí)景行車(chē)記錄儀
Flyaudio AR實(shí)景行車(chē)記錄儀 隱藏式專車(chē)專用行車(chē)記錄儀
隱藏式專車(chē)專用行車(chē)記錄儀 隱藏式通用行車(chē)記錄儀
隱藏式通用行車(chē)記錄儀 FHD行車(chē)記錄儀
FHD行車(chē)記錄儀 HD行車(chē)記錄儀
HD行車(chē)記錄儀 吸頂智能電視
吸頂智能電視 輕奢版喇叭
輕奢版喇叭 優(yōu)雅版喇叭
優(yōu)雅版喇叭 黃金版喇叭
黃金版喇叭


 粵公網(wǎng)安備 44011602000135號(hào)
粵公網(wǎng)安備 44011602000135號(hào)